The Gizmo editor turns a text prompt into a simulation-ready 3D scene: meshes,
materials, articulated joints, and physics. This page walks through everything
you can do in the editor, in the order you will usually do it. It is written for
sim creators, so it errs on the side of explaining each panel rather than
assuming you already know where things live.
First time in the editor? An interactive in-app tour pops up automatically and
highlights each panel described below. You can re-open it any time from the
? (help) button in the top-right of the toolbar.
The layout
The editor has three regions:
- Left panel is your toolset, organized into tabs:
- Agent generate with AI (this is where most scenes start).
- Assets every generated or placed asset in the scene, as a list.
- Shapes the individual primitives (boxes, cylinders, and so on).
- Lights the lights you have added plus the global scene lighting.
- Robotics robot spawns, semantic regions, and sensor anchors.
- Scene scene type, physics defaults, and export settings.
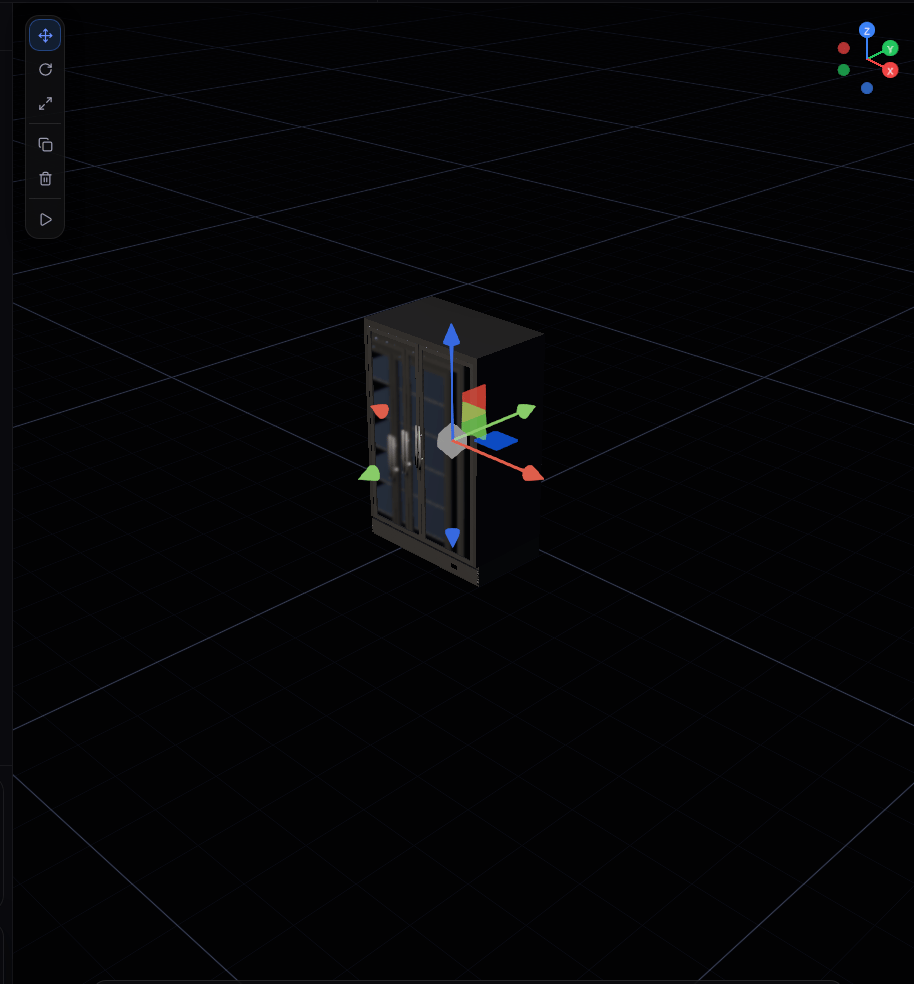
- Center is the 3D viewport, with the transform and Play tool strip in the
top-left corner.
- Right panel is the Inspector (properties of the selected object) and
the Asset Library (every asset generated for this scene, ready to re-place).
You can toggle the left and right panels with the [ and ] keys to give
the viewport more room.
1. Describe what to build
On the Agent tab, type what you want in plain English and press Enter.
You can describe a single asset, a full scene, or a robot workspace.
a red metal toolbox with a hinged lid and a carry handle
Add a reference image (optional)
Click the paperclip to attach a photo or sketch, or just drag an image onto
the bar. Gizmo matches the generated asset’s shape, proportions, and materials
to your reference. This is the fastest way to get a specific look.
Write prompts that generate well
The agent builds joints and collision geometry around the parts you describe, so
the more concrete you are about structure, the better the result:
- Name the moving parts. Say which pieces should open, rotate, or slide (for
example “a cabinet with two hinged doors and one sliding drawer”). Each becomes
an articulated joint.
- Give a rough size. “About 1.2 m tall” keeps the asset at a realistic scale
for a robot to interact with.
- Call out materials and affordances. Mention handles, knobs, or grips you
want a robot to grasp, and the material (metal, wood, plastic) for each part.
- Start simple, then iterate. Generate the core object first, then refine it
with follow-up messages (see step 3).
Browse Starter Prompts for prompt patterns that reliably
produce clean, articulated assets. 2. Watch the pipeline run
After you submit, a progress panel streams each stage of generation live, just
above the input bar. Under the hood the agent plans the asset, generates each
component, assembles and reviews them, refines materials, then wires up joints
and physics, validating the result for robotics use.
While it runs you can:
- Queue a follow-up. Type another instruction and it is applied after the
current step finishes.
- Stop. Cancel the run with the stop button.
When generation finishes, the asset appears in the viewport and is saved to this
scene’s Asset Library for re-use.
3. Keep chatting to edit the scene
The Agent panel is not just for the first generation. Once a scene exists, keep
typing instructions to change it: “make the drawer deeper”, “add a second shelf”,
“swap the handle for a round knob”, or “scatter four mugs on the counter”. The
agent edits the existing scene in place rather than starting over, so you can
build up a complex environment one instruction at a time.
4. Navigate and edit in the viewport
The tool strip in the top-left of the viewport controls how you edit selected
objects:
| Tool | What it does |
|---|
| Move | Translate the selection along the gizmo axes |
| Rotate | Rotate the selection |
| Scale | Resize the selection |
| Play | Simulate physics in the browser to check joints and stability |
Camera and selection shortcuts
| Key | Action |
|---|
| WASD | Fly the camera |
| Right-mouse drag | Look around |
| F | Focus the selected object |
| Esc | Deselect |
| Del | Delete the selection |
| Ctrl+Z / Ctrl+Shift+Z | Undo / Redo |
| Ctrl+D | Duplicate the selection |
| [ / ] | Toggle the left / right panels |
Test physics with Play
Press Play to drop the scene into a live physics simulation right in the
browser. Use it to confirm that doors swing the right way, drawers slide along
the correct axis, and nothing falls through the floor or jitters. Pause to
freeze, and Stop to return to editing exactly where you left off. Running
Play before exporting catches most articulation and stability problems early.
5. Group parts so joints work
Joints connect parts that move relative to each other (a lid to a box, a drawer
to a cabinet). Generated assets are grouped for you, but when you build or edit
by hand you may need to group parts yourself so they articulate as one mechanism.
On the Shapes or Assets tab, click Group, tick the parts that belong
together (you need at least two), then click Done. Group by mechanical
function: everything that should move together as one rigid body, with the parts
that rotate or slide relative to it kept as separate, jointed pieces.
See Joints and Physics for how articulation is modeled.
6. Add things by hand
Generation gets you most of the way, but you can also build or extend a scene
manually.
- Create menu (toolbar) and the Shapes tab drop in primitives: box,
sphere, cylinder, cone, capsule, torus, ellipsoid, wedge, tube, and more. The
Create menu also adds a Rope.
- Lights drop in directional, point, or spot lights from the Create menu, and
manage them (plus the global scene lighting) on the Lights tab.
- Robotics add robot spawns, semantic regions, and sensor anchors (covered in
step 8).
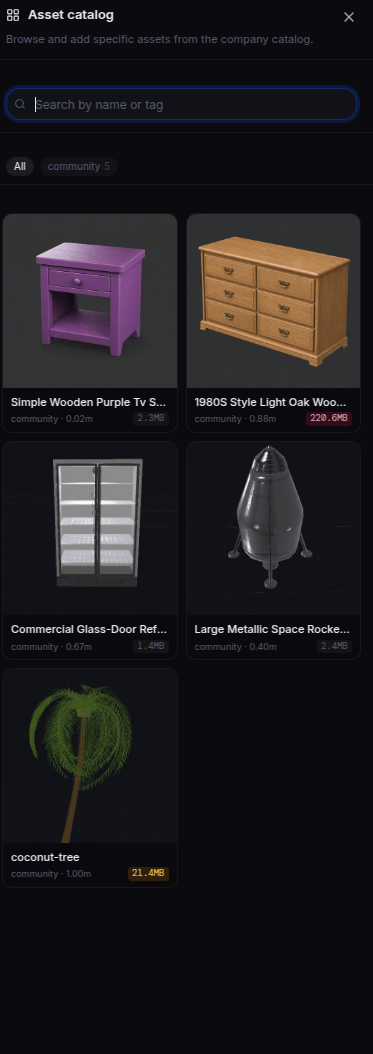
Drop in premade assets
Click Catalog in the toolbar to browse a library of ready-made, physics-ready
props. Search by name, preview in 3D, and place directly into your scene with no
waiting for generation.
Build a single asset in isolation
Click Asset Builder in the toolbar to open a focused workspace for creating
or refining one asset on its own, away from the full scene. Save it to the Asset
Library when you are done, and it becomes available to place like any other asset.
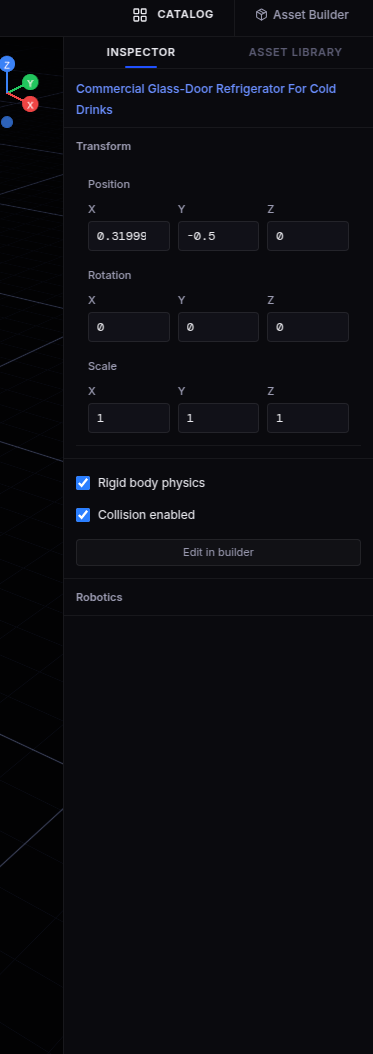
7. Inspect and fine-tune
Select any object to open the Inspector on the right. This is where you dial
in the exact values a simulator needs.
The Inspector exposes:
- Transform position and rotation (and scale), edited numerically or with the
viewport gizmos.
- Dimensions the primitive’s size parameters.
- Material surface type and color, with physically based presets (metal,
plastic, wood, glass, rubber, and more).
- Rigid physics mass, density, friction, and restitution, plus advanced
options like continuous collision detection, linear and angular damping, and
center of mass.
- Robotics properties on assets: body type (dynamic, static, articulated,
kinematic, or visual-only) and collision approximation (convex hull, box,
sphere, capsule, trimesh, or compound). These map directly to how the asset
behaves in the simulator.
- Joints the joint type and its limits, stiffness, and damping for articulated
parts.
The Asset Library tab (next to Inspector) lists every asset generated for
this scene, so you can re-insert copies without regenerating. It also has an
import button for bringing in your own USD, USDZ, or GLB assets.
After generating, it is worth a quick check:
- Are the dimensions reasonable for a robot to interact with?
- Are doors, drawers, and lids grouped correctly?
- Do joints rotate or slide in the expected direction (use Play)?
- Are collision shapes present and is mass / friction populated?
8. Set up the scene for robotics
The Robotics tab and the Create > Robotics menu add the entities a
simulator needs beyond geometry:
- Robot spawn marks where (and which) robot enters the scene. You can also
embed a specific robot at export time (see step 10).
- Semantic region a named volume (for example “pickup zone” or “goal area”)
used for tasks, rewards, and navigation targets.
- Sensor anchor a placed pose for a camera, depth camera, lidar, IMU, or
contact sensor, so your robot perceives the scene from a known location.
Select any of these to position it and edit its properties in the Inspector, just
like a primitive. A sensor anchor, for example, exposes its sensor type (RGB,
depth, segmentation, lidar), field of view, and resolution; a robot spawn exposes
its name and base region.
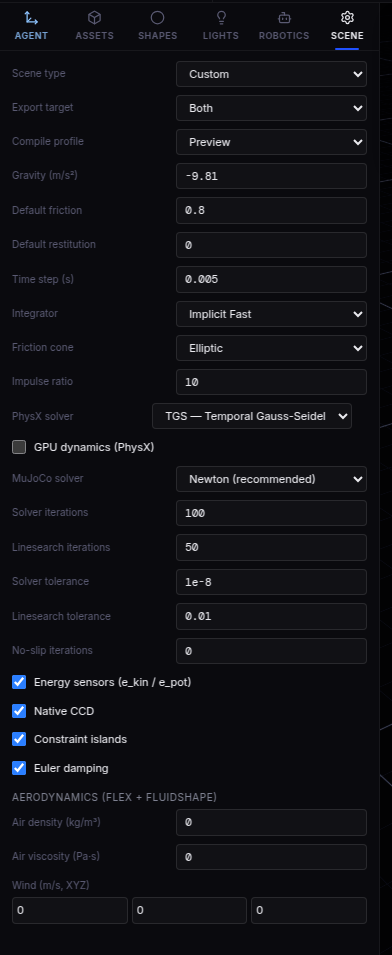
9. Scene settings and physics defaults
Open the Scene tab to configure how the whole scene compiles and simulates.
These defaults apply to every object that does not override them, so setting them
once here saves a lot of per-object tuning.
- Scene type manipulation, navigation, loco-manipulation, dexterous, or
custom. This signals the intended task.
- Export target Isaac Sim, MuJoCo, or both, so the scene compiles for the
right backend.
- Compile profile preview, default, fast (low fidelity), accurate (high
fidelity), or GPU-accelerated, trading speed against fidelity.
- Global physics gravity, default friction, default restitution, and the
simulation time step.
- Solver settings the integrator and friction cone, the PhysX solver (for
Isaac Sim), and the MuJoCo solver with its iteration and tolerance controls
(important for stable RL training).
- Aerodynamics optional air density, viscosity, and wind for scenes that use
soft bodies or fluid shapes.
If you are not sure, leave these at their defaults. Gravity of -9.81 m/s²,
default friction, and the recommended solver work well for most manipulation
scenes. Revisit them only when simulation behavior looks off.
Save your work
The scene autosaves as you work. The Save button in the toolbar turns
green whenever there are unsaved changes; click it to save immediately, and it
shows a checkmark once everything is stored. There is also a Clear all button
next to it that empties the scene, so use it deliberately.
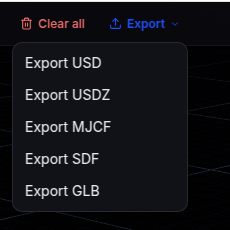
10. Export to your simulator
When the scene is ready, use Export in the toolbar. The same scene can be
exported to multiple targets, and joints and physics come along, so it is ready
to simulate.
| Target | Format |
|---|
| Isaac Sim / Omniverse | USD / USDZ |
| MuJoCo | MJCF zip |
| Gazebo | SDF world bundle |
| Mesh interchange | GLB |
A typical end-to-end flow
- Describe the asset or scene on the Agent tab, optionally with a reference
image.
- Watch the pipeline finish, then chat to refine it.
- Navigate the viewport and press Play to check joints and stability.
- Add anything missing by hand (Create menu, Catalog, Asset Builder).
- Inspect key objects to tune dimensions, materials, mass, and joints.
- Add robotics entities (spawn, regions, sensors) and set Scene physics.
- Save, then Export to your simulator.
Next steps